لیدار ( LIDAR : Light Detection and Ranging ) ، یکی از فناوریهای سنجش از راه دور است که با تاباندن لیزر به هدف و تجزیه و تحلیل نور بازتابشده، فاصله را اندازه میگیرد. لایدار مشابه رادار است که بعضی اوقات نیز رادار لیزری نامیده میشود.
اختلاف اصلی لایدار و رادار، طول موجهای تابشی مورد استفاده است. رادار از طول موجهایی در ناحیه رادیویی استفاده میکند در حالی که لایدار طول موجهای لیزری بکار میبرد.این فناوری پیشرفته برای اندازهگیری فواصل با استفاده از لیزر و تولید نقشههای سهبعدی از سطوح و ویژگیهای زمین استفاده میشود.

روش متداول برای تعیین کردن فاصله تا یک جسم یا سطح استفاده از پالسهای لیزری است. مانند فناوری رادار که از امواج رادیویی استفاده میکند و فاصله تا جسم با اندازهگیری اختلاف زمانی بین ارسال پالس و دریافت پالس بازتابی تعیین میکنند.
فناوری لایداردر زمینسنجی، ژئوماتیک، زمینریختشناسی، لرزهسنجی، جنگلداری، ارزیابی فاصله دور و فیزیک هواشناسی کاربرد دارد. کاربرد لایدار شاملALSM(لیزر هوابرد نگاشت ردپا)، ارتفاع زمینسنجی به وسیله لیزریالایداربرایتهیه«نقشه عوارضنما» است.
اسم مخفف دیگری به شکل «LADAR» (آشکارسازی لیزر و مسافتیابی) معمولاً در زمینه نظامی استفاده میشود.
واژه رادار لیزری، نیز استفاده میشود اگرچه لایدار از ریزموج با امواج رادیویی استفاده نمیکند که برای رادار تعریف شدهاست.
نحوه عملکرد لیدار روی پهپاد
تکنولوژی سیستم LIDAR تقریبا همانند لیزر کار می کند و داده های آن به سه طریق زمینی، هوایی و فضایی قابل برداشت و جمع آوری می باشد. این سیستم همانطور که گفته شد یک سیستم نوری بوده به این منظور که برای برداشت یک دسته اشعه نوری را به بیرون می فرستد و با دریافت آنها و پردازش و تحلیل های مربوطه که در ادامه به آن می پردازیم فاصله اندازه گیری می شود.
این سیستم از چهار قسمت زیر تشکیل شده است:
- اشعه
- GPS
- IMU
- سیستم کامپیوتری

قسمت اول اشعه می باشد که در این سیستم از اشعه نورمرئی سبز (۵۳۲ نانو متر) و اشعه مادون قرمز نزدیک (۱۰۶۴ نانو متر) که در طیف امواج الکترو مغناطیس هستند استفاده می شود.این طیف از امواج به دلیل بازتاب بسیار خوب آنها از سطح پوشش های گیاهی مورد استفاده قرار می گیرد.
قسمت دوم سامانه تعیین موقعیت یاGPS می باشد که بهتر است از یکGPSبسیار دقیق برای انجام برداشت در پرنده استفاده شود.با استفاده از این سامانه می توان موقعیت دقیق پرنده را در لحظه ارسال پالس با دقت بسیار بالا به دست آورد و به همین ترتیب موقعیت دقیق پالس در زمان ارسال از سطح عارضه نیز بدست می آید. عملیات و روند موقعیت یابی می تواند به دو روشRTKیاPPKانجام گیرد.
قسمت سوم، سنسور دقیقی است به نام IMU (Inertial Measurment Unit) که پارامتر های دورانی پرنده را در سه جهت اصلی (yaw, pitch, roll)در لحظه برداشت با دقت اندازه گیری می کند. این مقادیر در دقت ارتفاع محاسبه شده بسیار موثر می باشند.
اخرین قسمت سامانه برداشت باLIDARقسمت ذخیره سازی می باشد.داده های برداشت شده به صورت آنی در یک سیستم کامپیوتری یا یک فضای ذخیره سازی باید جمع آوری و ذخیره شوند تا در مراحل بعدی به منظور مقاصد مختلف مورد تحلیل و بررسی قرار گیرند.
در سیستم لیدار، اساس کار بر پایه ارسال و دریافت پالسهای لیزری است. این پالسها به سمت سطح زمین فرستاده میشوند و پس از برخورد با عوارض، بازتاب شده و توسط سنسور دریافت میشوند. زمان رفت و برگشت پالسها به وسیله یک ساعت دقیق اندازهگیری میشود.
با دانستن سرعت نور، فاصله پرنده (پهپاد یا هواپیما) تا عارضه مورد نظر که پالس از آن بازتاب شده است، به صورت زیر محاسبه میشود:
فاصله =
با استفاده از دادههایGPS، ارتفاع پرنده به دست میآید. سپس با کم کردن فاصله محاسبه شده از ارتفاع پرنده، ارتفاع سطح زمین تعیین میشود.
اشعههای ارسالی با زاویه خاصی از پرنده به سمت زمین فرستاده میشوند. این زاویهها توسط ژیروسکوپ داخل پرنده با دقت بالا اندازهگیری میشوند. برای انجام محاسبات دقیق، این زوایا و مقادیرIMU(واحد اندازهگیری اینرسی) باید در نظر گرفته شوند تا فاصله یابی دقیقی حاصل شود.
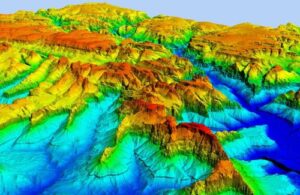
پالسهای لیزری پس از برخورد با اولین جسمی که در مسیرشان قرار میگیرد، بازتاب میشوند. آخرین پالسهایی که به دستگاه میرسند، از سطح زمین بازتاب شدهاند. بنابراین، برای به دست آوردن مدل رقومی ارتفاعی (DEM) سطح زمین، پالسهایی که در آخرین مرحله دریافت میشوند، فیلتر میشوند و با استفاده از درونیابی، مدل رقومی سطح زمین برای کل منطقه مورد نظر ایجاد میشود.
برای شناسایی عوارضی مانند درختان و ساختمانها، مقادیر کل دریافتی از آخرین پالسهای دریافتی کسر میشود. به عبارت دیگر، با کسر سطح زمین از کل دادههای برداشتی، عوارض موجود بر روی سطح زمین شناسایی و مشاهده میشوند. این فرآیند به ما امکان میدهد تا به دقت نقشههای سهبعدی از سطح زمین و عوارض مختلف را تهیه کنیم و برای کاربردهای متنوعی از جمله نقشهبرداری، مدیریت منابع طبیعی و برنامهریزی شهری از آنها استفاده کنیم.
کاربردهای لیدار
نقشهبرداری و کارتوگرافی: تولید نقشههای توپوگرافی دقیق با جزئیات بالا برای استفاده در مهندسی عمران، برنامهریزی شهری و تحقیقات جغرافیایی یکی از کاربرد های مهم لیدار است. از آنجایی که سیستم لیدار دارای وضوح و دقت بالا در ایجاد نقشه ها می باشد،این سیستم می تواند در نقشه برداری جاده، ساختمان و پوشش گیاهی در ارتباط با عکاسی هوایی مورد استفاده قرار گیرد.جنبه سه بعدی سیستم لیدار باعث می شود نقشه برداری از مدل های زمین، بخصوص توپوگرافی کوهستان های پیچیده مناسب باشد. سایر داده های توپوگرافی از این سیستم مانند نقشه های منحنی میزان با وضوح بالا قابل استخراج هستند.
برنامه ریزی شهری
رنامه ریزی شهری، نظم برنامه ریزی استفاده از زمین است که به چند جنبه از محیط های ساخته شده و اجتماعی شهرداری ها و جوامع می پردازد. داده های سیستم لیدار یک تکنولوژی نسبتا جدید برای به دست آوردن مدل های سطحی دیجیتال(DSM)سطح زمین می باشند. این داده ها، هنگام ترکیب با ارتوپدی دیجیتال، می توانند برای ایجادDSMهای بسیار دقیق و در نهایت مدل های دیجیتالی شهر استفاده شوند.
با استفاده از نرم افزار اختصاصی می توان مدل های سطح تخمینی ساختمان ها را از داده های اصلیLiDARتهیه کرد. این تکنولوژی باعث می شود که مدل های بزرگ منطقه ای در یک فضای بسیار کوتاه ایجاد شوند.
باستانشناسی
کشف و مستندسازی سایتهای باستانی و آثار تاریخی که در زیر پوشش گیاهی یا خاک پنهان هستند.
لایدار کاربردهای گستردهای در زمینه زمینشناسی دارد که شامل کمک در طرحریزی فعالیتهای میدانی، نقشهبرداری از عوارض زیر چتر جنگل اجسام پیوستهای که ممکن است بر روی زمین غیرقابل تشخیص باشند، میباشد. هم چنین لایدار میتواند این امکان را برای باستان شناسان فراهم کند که بتوانند مدلهای ارتفاعی دیجیتالی (DEMS) با وضوح بالا از مکانهای باستانی بسازند که میتواند توپوگرافی در حد میکرو را آشکار کنند اگر چه با پوشش گیاهی پوشیده پنهان شده باشد. اطلاعات بدست آمده از لایدار به آسانی میتوانند در سامانه اطلاعات جغرافیایی گنجانده شود.
برای تحلیل و ترجمه به عنوان مثال در دو محل تاریخی در کانادا به نامهای فورت کانبرلند و فورت بنسژور. سابقاً ویژگیهای باستانشناسی کشف نشدهای نگاشت شده بود که مربوط به قطعه نظامی دژ در ۱۷۷۵ بود. ویژگیهایی که از روی زمین یا از طریق عکسهای هوایی غیرقابل تشخیص بود. روی هم قرار دادن سایههای تپههای بدست آمده از demکه یا نورپردازی مصنوعی از زاویههای مختلف ساخته شده بودند تشخیص داده شدند، با استفاده از لایدار توانایی ایجاد مجموعه دادهها سریع و به نسبت ارزان یک مزیت محسوب میشود.
فراتر کارایی، قابلیت آن در نفوذ کردن در زیر جنگل موجب کشف گونههایی شدهاست که از طرق سنتی زمین سه بعدی غیرقابل تشخیص بودهاست و با روش نقشهبرداری زمینی نیز سخت میباشد. اخیراً با فناوری لایدار ۶۱۰۰۰ سازه باستانی جدید از تمدن مایا در گواتمالا کشف شدهاست.
صنعت خودروسازی
لایدار در سیستمهایAdaptive Cruise Control (ACC) برای اتومیبلها استفاده میشود. چنین سیستمهایی توسط Siemens Hella، از یک افزاره لایدار که در جلو خودرو نصب میشود استفاده میکنند. معمولاً این سیستم بر روی سپر ماشین، برای زیر نظر گرفتن فاصله خودرو با هر خودرویی که در جلوی آن قرار دارد نصب میشود. هنگامی که خودرو جلویی سرعت خود را کاهش دهد، یا خیلی نزدیک شودACCترمز را فعال میکند تا خودرو سرعتش کم شود، ولی هنگامی که مسیر جلو خالی است،ACCبه خودرو این اجازه را میدهد که سرعت خودرو تا حدی که راننده از قبل تعیین کردهاست، افزایش یابد.

پینگ بک: نقشه برداری دقیق - تأثیرات نقشه برداری در زندگی مدرن و فناوریهای نوین
پینگ بک: صفر تا صد نقشهبرداری: هرآنچه باید درباره فناوریها و ابزارهای مدرن بدانید - نقشه برداری شاخص
پینگ بک: نقشهبرداری در مدیریت بلایای طبیعی: راهکاری علمی برای حفاظت از جوامع - نقشه برداری شاخص